By Beth Mortimer, Department of Zoology, University of Oxford
According to most science fiction, robots of the future are essentially human machines. Think for instance of C-3PO with his humanoid features plated in shiny armour. These fictional robots are often surprisingly agile across a range of terrains. But in reality, most contemporary robots struggle to move on anything other than a flat surface.
Collaborations between biologists and engineers are now turning away from hard, mechanical systems of classical science fiction, and instead are looking towards more complicated, biologically-inspired ‘soft’ robots. Far from looking like us, or even other mammals, researchers are looking towards smaller species for inspiration, such as caterpillars.
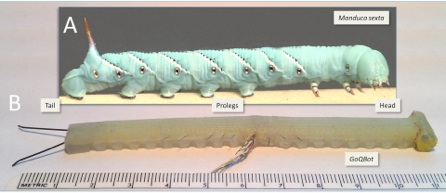
Barry Trimmer, a professor at Tufts University, is one of the pioneers of bioinspired soft robotics. A biologist by training, Trimmer was initially drawn to the hawkmoth caterpillar (Manduca sexta) as a model system to study the neural mechanisms behind their locomotion, calling his caterpillars “living prototypes.”
This might seem a strange choice: caterpillars are not very fast or efficient movers, and unlike traditional ‘hard’ robots, they are completely soft, with few hard parts. For engineers, however, they have ideal attributes. Caterpillars are good at accessing hard-to-reach spaces and can cope with complex terrain, even vertical surfaces, with no change in their basic movements. They also flexibly reposition their bodies and bridge gaps effectively. These characteristics can make robots inspired by caterpillars particularly useful for life-saving applications, such as search-and-rescue operations.
Still, the soft body plan of the caterpillar does not come without its own problems. For example, control of soft robots is potentially complicated because they lack simple hinged joints—common in traditional hard robots—which usefully limit movement. Instead, the soft robots are effectively bags of water, capable of moving in a nearly infinite number of possible directions. To address this problem, Trimmer’s team has turned to nature’s solutions, studying the intricate mix of moving parts, neural control, and sensors that work together to produce directed movement in these soft-bodied insects.
For years, caterpillars were thought to generate movement by controlling body pressure, squeezing at one end and extending at the other. It turns out that this plays only a minor role. In reality, Trimmer’s team discovered that the body segments do not expand and contract during crawling. Instead, forward propulsion is provided by lifting body segments in sequence through gripping the walking surface, which provides support externally. The key to their movement is therefore the grip of their rear legs (known as ‘prolegs’), something which is easily mimicked in soft-robot design.
A Manduca caterpillar in motion. Video courtesy of Dr. Barry Trimmer.
Additionally, the caterpillar controls its movement very simply, enabling this mechanism to be easily copied in robots. Nerve impulses carefully coordinate the timing of muscle activation between segments and foot detachment from the walking surface. It is thought that the nerves fire automatically once crawling is initiated and the speed of crawling simply correlates with the timing of muscle activation.
When it comes to more complex surfaces, caterpillars cope by making use of sensors. Stiff sensory hairs are present on every proleg that allow the caterpillar to detect upcoming obstacles. When an obstacle is detected, body segments will shorten, lifting the ‘feet’ to allow the caterpillars to step over and onto objects.
“Caterpillars are a constant source of inspiration and information, which may lead to life-saving innovations,” says Trimmer. He envisages thousands of robo-caterpillars being released following earthquakes as part of a search-and-rescue operation. Robots could navigate the complex terrain to find trapped people and deliver water. This would significantly increase people’s chance of survival, allowing more time for heavy equipment to fetch them out of the rubble.
Beyond this, the flexibility of soft robots offers a range of new potential applications not open to hard robots, from medical devices to use in space. Also, given their small size, soft robots can be produced in large numbers and potentially provide ‘green’ alternatives to traditional hard robots. Given the recent advances in 3D printing, the goal is to make these robots quickly and in bulk at under $100 a go. The production materials can be biodegradable, and research into low-energy production of polymers with tailored properties for specific applications is well on its way.
With all these benefits, soft-bodied robots of the future are slowly but surely becoming a reality.
Trimmer presented the results of this research at the 2014 annual meeting of the Society for Integrative and Comparative Biology in Austin, Texas.

Beth Mortimer is in the final stages of her D. Phil at the University of Oxford, UK. A biologist by background, Beth’s research uses physical sciences techniques to answer biological questions about spider and silkworm silks. She spends a lot of time disseminating her enthusiasm of science to others, through her teaching post as Lecturer in Biology at Jesus College, Oxford, or through various public engagement activities.