SICB Annual Meeting 2011
January 3-7, 2011
Salt Lake City, UT
Symposium: Bioinspiration: Applying mechanical design to experimental biology

Our goal is to bring together scientists who work in similar fields of bioinspired robotics but have likely never interacted with each other, to address some of the grand challenge issues: understanding the organism’s role in organism-environment linkages, utilizing the functional diversity of organisms, integrating living and physical systems analysis, and understanding how organisms walk the tightrope between stability and change. More recently, biologically-inspired robotic models are being used to address these research facets in all kingdoms of biological science. This symposium will provide a forum for leaders from different areas in experimental applications of biologically-inspired robotic designs to present their techniques and research which is defining the development of this field. Bioinspired constructions rely heavily on a thorough understanding of the physiological and mechanical attributes of the organism in question and often offer a “proof of concept” validation of that understanding if the device is able to replicate organismic locomotion. Also, bioinspired robotics offer researchers the ability to examine a more thorough parameter space of organismal function by permitting study of a wider array of locomotor repertoires than an organism may perform regularly or repeatedly. In the last few years, there have been numerous successful applications of bioinspired robotics that have been both a product and experimental aspect of research in invertebrate and vertebrate morphology and comparative biomechanics. The speakers we have invited study cells, gastropods, fish, insects, marine mammals, and terrestrial organisms from engineering, medical, evolutionary, and biological perspectives.
Sponsors
This symposium is sponsored by the following divisions: DCB, DVM, DIZ
Organizers
- Brooke Flammang (Harvard University)
- Marianne Porter (Vassar College)
Speakers
S5.1 Wednesday, Jan. 5, 07:50 FLAMMANG, B.E.*; PORTER, M.E.:
Introduction “Bioinspiration: Applying mechanical design to experimental biology”
S5.2 Wednesday, Jan. 5, 08:00 LEDUC, Philip:
Linking Mechanics to Biochemistry in Molecular and Cellular Behavior through Systems Based Approaches
S5.3 Wednesday, Jan. 5, 08:30 TANAKA, H*; WOOD, R J:
At-scale artificial insect wings by microfabrication techniques
S5.4 Wednesday, Jan. 5, 09:00 DABIRI, John O.:
Jellyfish-inspired propulsion
S5.5 Wednesday, Jan. 5, 10:00 WINTER, V, A.G.*; DEITS, R.L.H.; DORSCH, D.S.; HOSOI, A.E.; SLOCUM, A.H.:
Razor Clam to RoboClam: Biologically Inspired Mechanisms for Subsea Burrowing
S5.6 Wednesday, Jan. 5, 10:30 LONG, JH*; HIROKAWA, J; ROBERTS, S; KRENITSKY, N; FRIAS, C; DE LEEUW, J; PORTER, ME:
Testing Biomimetic Structures in Bioinspired Robots
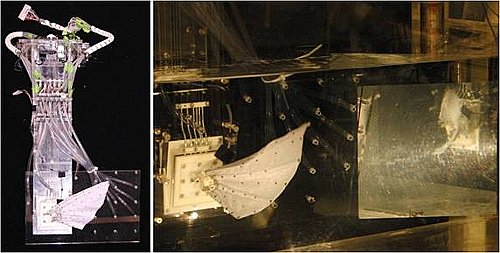
S5.7 Wednesday, Jan. 5, 11:00 TANGORRA, James*; ESPOSITO, Chris; PHELAN, Chris; LAUDER, George:
The Development of Biorobotic Models of Highly Deformable Fins and Fin Sensory Systems
S5.8 Wednesday, Jan. 5, 11:30 SWARTZ, SM*; BREUER, KS:
How can bats inspire robotic fliers and micro air vehicles?
S5.9 Wednesday, Jan. 5, 13:00 FULL, R.J.*; JAYARAM, K.; MONGEAU, J.M.; BIRKMEYER, P.; HOOVER, A.; FEARING, R.S.:
Role of Robustness in Running: Bio- and Bio-inspired Exoskeletons
S5.10 Wednesday, Jan. 5, 13:30 LEE, David/V*; BIEWENER, Andrew/A:
Biomechanical Analyses of Goats and Dogs in the BigDog Project
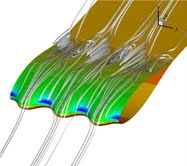
S5.11 Wednesday, Jan. 5, 14:00 FISH, F.E.:
The humpback whale flipper for application of bio-inspired tubercle technology
S5.12 Wednesday, Jan. 5, 14:30 PELL, Chuck:
Perspective on Biomechanics and Biomimetics: Successes, Gaps and Regions Unexplored